1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
| """
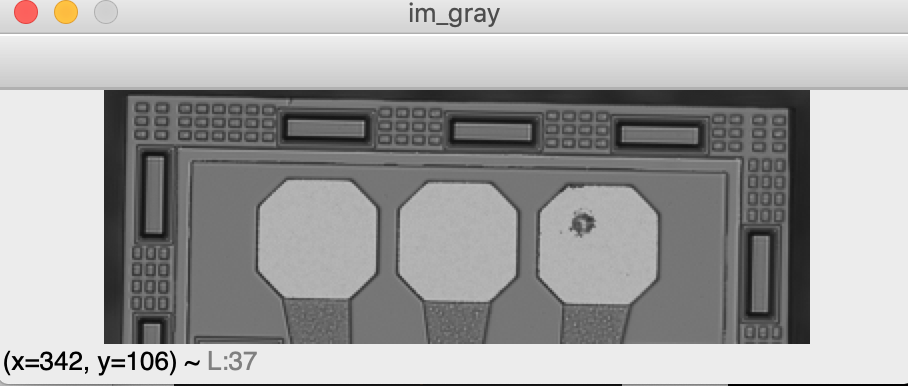
1.读取图像
2.灰度化
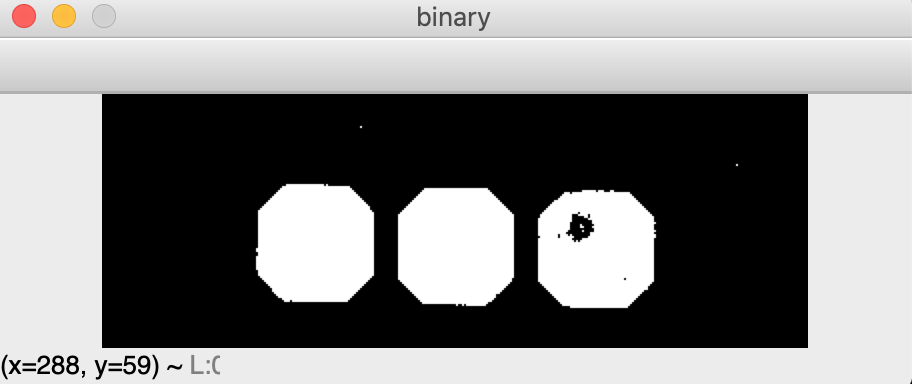
3.二值化,查找到合适阈值
4.在二值化上查找轮廓(只检测外层轮廓)
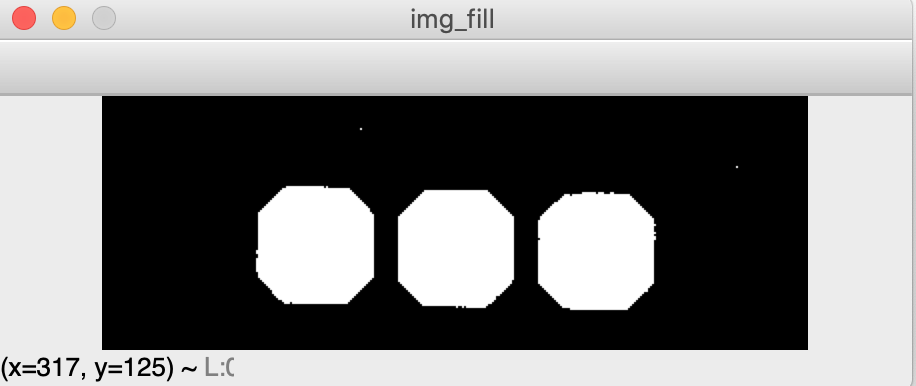
5.构建和二值化shape一样的纯黑色图像(值为0)
6.将度盘区域轮廓,使用实心化填充,画在mask上,白色
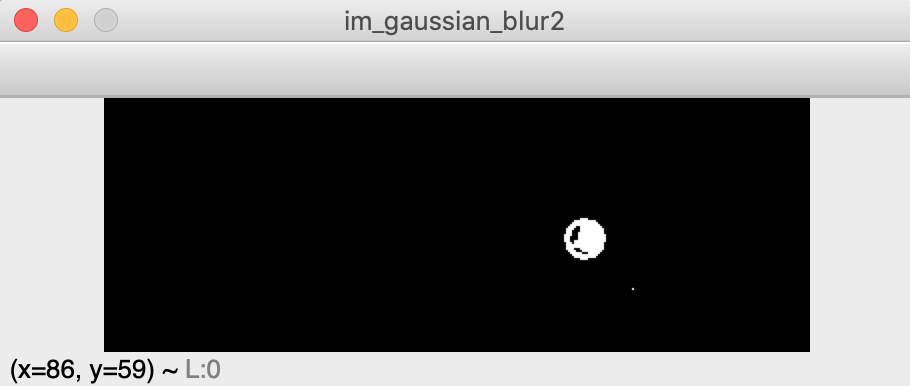
7.二值化图像,与实心化填充的结果 做减法,找到瑕疵区域
8.对瑕疵区域做闭运算(先膨胀,后腐蚀)
9.找到瑕疵区域的轮廓
10.计算瑕疵区域的面积,判断是否属于瑕疵(大于10为瑕疵)
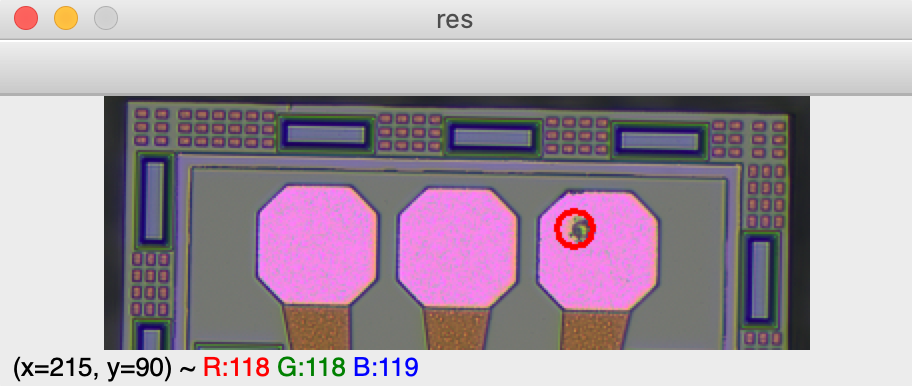
11.如果为瑕疵,拟合瑕疵区域的最小外接圆
12.将最小外接圆画在原始图像上
"""
import cv2
import numpy as np
import math
im_cpu = cv2.imread("../data/cv_cpu.png")
im_gray = cv2.cvtColor(im_cpu, cv2.COLOR_BGR2GRAY)
ret, im_bin = cv2.threshold(im_gray, 162, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(im_bin, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
mask = np.zeros(im_bin.shape, np.uint8)
mask = cv2.drawContours(mask, contours, -1, (255, 0, 0), -1)
im_sub = cv2.subtract(mask, im_bin)
k = np.ones((10, 10), np.uint8)
im_close = cv2.morphologyEx(im_sub, cv2.MORPH_CLOSE, k, iterations=3)
contours, hierarchy = cv2.findContours(im_close, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
(x, y), radius = cv2.minEnclosingCircle(contours[1])
center = (int(x), int(y))
radius = int(radius)
area = math.pi * radius * radius
print("area:", area)
if area > 12:
print("度盘表面有缺陷")
print("center:", center, " radius:", radius)
cv2.circle(im_close, center, radius, (255, 0, 0), 2)
cv2.imshow("im_gaussian_blur2", im_close)
cv2.circle(im_cpu, center, radius, (0, 0, 255), 2)
cv2.imshow("im_cpu2", im_cpu)
else:
print("无瑕疵")
while True:
key = cv2.waitKey()
if key == 27:
cv2.destroyAllWindows()
break
|