DeepLearning-2.线性代数
条评论线性代数,主要面向连续数学,而非离散数学。
标量、向量、矩阵和张量
标量(scalar)
表示一个单独的数,通常用斜体小写字母表示,如:$\mathit{s}\in \mathbb{R},\mathit{n}\in \mathbb{N}$。
向量(vector)
表示一列数,这些数是有序列的,并且可以通过下标索引获取对应值,通常用粗体小写字母表示,如:$\mathbf{x}\in \mathbb{R}^{n}$,表示元素取实数,且有$n$个元素,第一个元素:$x_{1}$,第n个元素:$x_{n}$。向量写成列形式:
$$\begin{bmatrix}
x_{1}\\
x_{2}\\
…\\
x_{n}
\end{bmatrix}$$
矩阵(matrix)
表示一个二维数组,每个元素下标由两个数字确定,通常用大写粗体字母表示,如:$\mathbf{x}\in \mathbb{R}^{m\times n}$,表示元素取实数的$m$行$n$列矩阵,有$m\times n$个元素,可表示为$A_{1,1},A_{m,n}$,$A_{i:}$表示为第$i$行,$A_{:j}$表示为第$j$列。矩阵形式:
$$\begin{bmatrix}
A_{1,1} & A_{1,2} \\
A_{2,1} & A_{2,2}
\end{bmatrix}$$
矩阵逐元素操作:将函数$f$应用到A的所有元素上,用$f(A)_{i,j}$表示。
张量(tensor)
超过二维的数组,表示同矩阵,如:A表示三维张量,$A_{i,j,k}$表示其元素。
转置(transpose)
矩阵转置相当于沿着对角线翻转,定义如下:$A_{i,j}^{\top } = A_{j,i}$。
- 矩阵转置的转置等于矩阵本身:$\left ( A^{\top} \right )^{\top} = A$
- $(A+B)^{\top} = A^{\top} + B^{\top}$
- $(\lambda A)^{\top} = \lambda A^{\top}$
- $(AB)^{\top} = B^{\top}A^{\top}$
程序实现
1 | # 矩阵转置 |
矩阵加法
加法即对应元素相加,要求两个矩阵形状一样:
数乘即一个标量与矩阵每个元素相乘:
广播是矩阵和向量相加,得到一个矩阵,将$b$加到了$A$的每一行上,本质上是构造了一个将$b$按行复制的一个新矩阵。
程序实现
1 | # 矩阵加法 |
矩阵和向量相乘
两个矩阵相乘得到第三个矩阵,$A_{m\times n},B_{n\times p}$,相乘得到矩阵$C_{m\times p}$:
具体定义为:
矩阵相乘不是对应元素相乘,元素对应相乘又叫Hadamard乘积,记作$A\odot B$。
向量可看作列为1的矩阵,两个相同维数的向量$x$和$y$的点乘(Dot Product)或者内积,可以表示为$x^{\top }y$。
矩阵乘积运算满足分配率和结合律:
不满足交换律:
程序实现
1 | # 矩阵乘法 |
单位矩阵和逆矩阵
单位矩阵(Identity Matrix)为乘以任意一个向量等于这个向量本身,记为:$I_{n}$,为保持$n$维向量不变的单位矩阵:
单位矩阵结构如:
$$\begin{bmatrix}
1 & 0 & 0\\
0 & 1 & 0\\
0 & 0 & 1
\end{bmatrix}$$
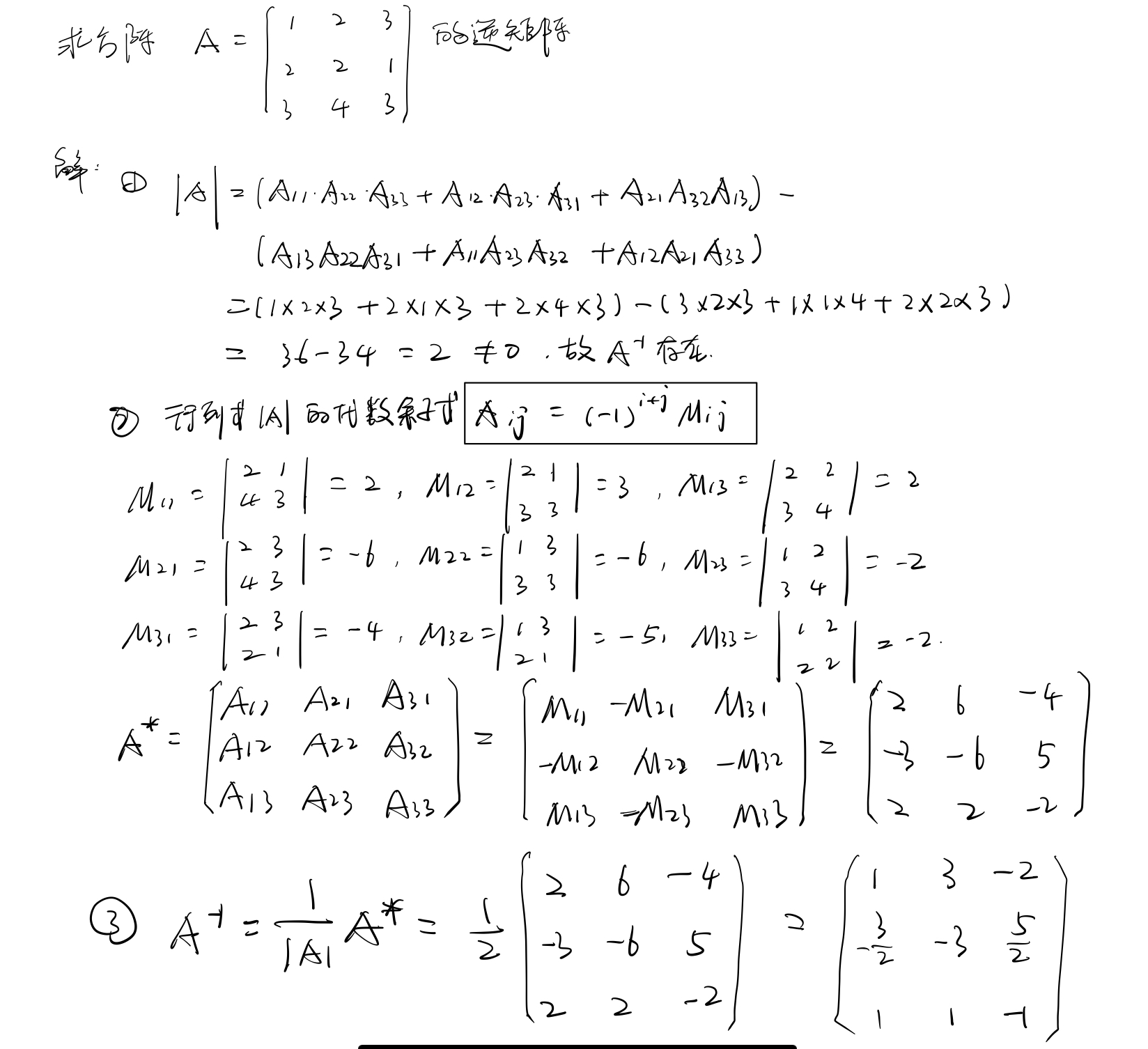
逆矩阵(Inverse Matrix):对于$n$阶矩阵$A$,如果有一个$n$阶矩阵$B$,使$AB=BA=I^{n}$,则矩阵$A$可逆,$B$为$A$的逆矩阵,$B=A^{-1}$。
如果$A^{-1}$存在,则线性方程组$Ax=b$的解为:
- 定理1:若矩阵$A$可逆,则$|A|\neq 0$。
- 定理2:若$|A|\neq 0$,则矩阵$A$可逆,且$A^{-1}=\frac{1}{|A|}A^{\ast }$,$A^{\ast}$为矩阵$A$的伴随矩阵。
- 定理3:当$|A|=0$时,称$A$为奇异矩阵。
- 定理4:$\left ( \lambda A \right )^{-1}=\frac{1}{\lambda}A^{-1}$
- 定理5:$\left ( AB \right )^{-1}=B^{-1}A^{-1}$
程序实现
1 | # 单位矩阵 |
手动推算
范数
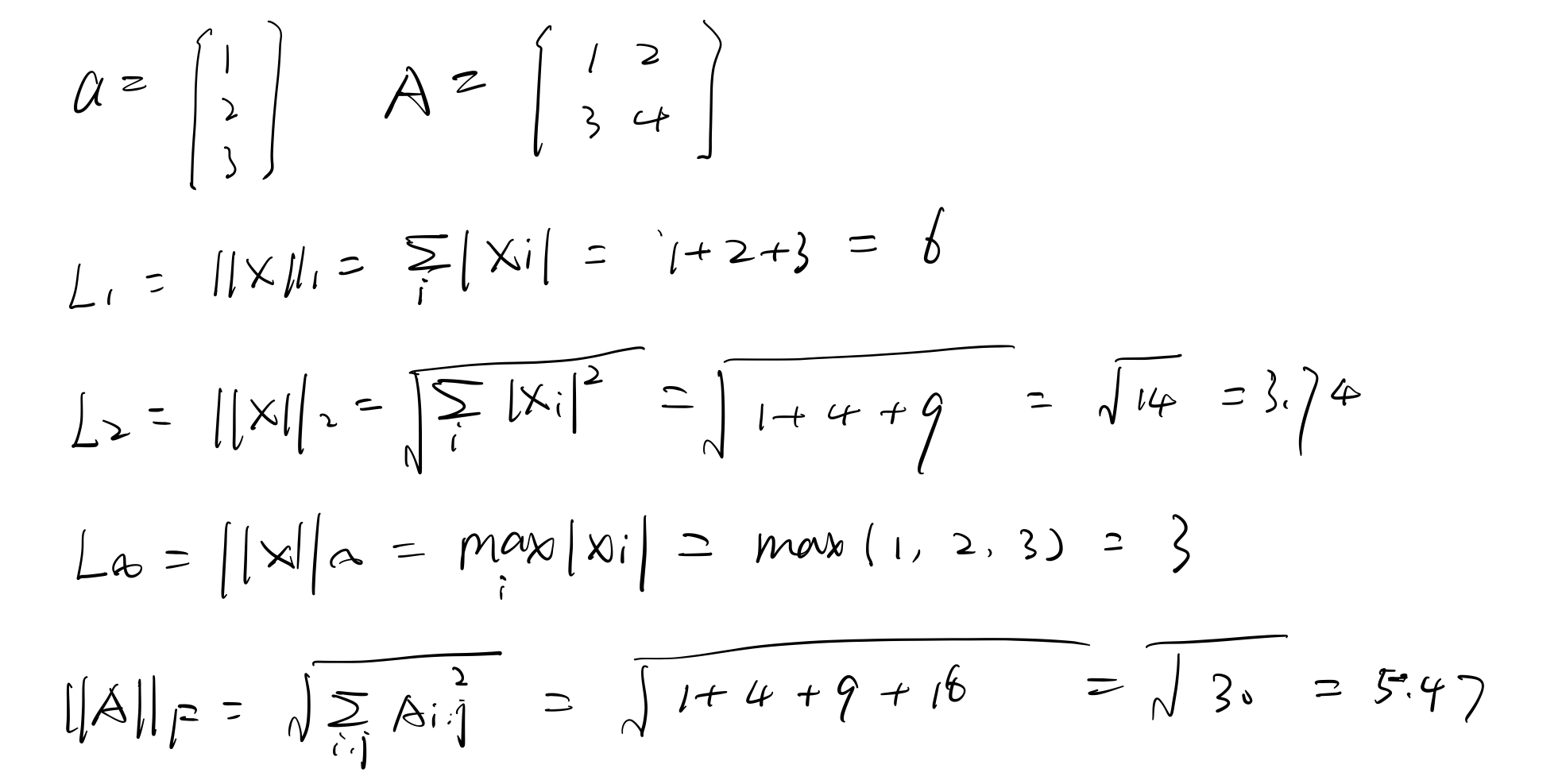
范数(norm)用来衡量向量的大小,向量$\mathbb{L}^{p}$范数定义为:
$L^{2}$范数,也称为欧几里得范数(Euclidean norm),是向量$x$到原点的欧几里得距离,$L^{2}$范数不一定适用于所有情况,当区别0和非常小但非0值的情况,$L^{1}$范数是一个比较好的选择。
$L^{1}$范数,在所有方向上的速率是一样的,定义为:
经常用于区分0和非0元素的情形中。
$L^{0}$范数,可用于衡量向量中非0元素的个数,但它并不是一个范数。
$L^{\infty }$范数,向量元素绝对值的最大值,也叫做(Max norm):
程序实现
1 | # 范数 |
手动推算
特殊类型的矩阵和向量
对角矩阵(diagonal matrix):只在主对角线含有非零元素,其余位置为零。如:
$$\begin{bmatrix}
1 & 0 & 0\\
0 & 2 & 0\\
0 & 0 & 3
\end{bmatrix}$$
并非所有的对角矩阵都是方阵,长方形矩阵也可能为对角矩阵,但没有逆矩阵。
对称矩阵(symmetric matrix):是转置和自己相等的矩阵。即:
单位向量(unit ventor):是具有单位范数(unit norm)的向量,即:
若$x^{\top}y=0$,则向量$x$和向量$y$互相正交(orthogonal)。正交且范数为1,则称为标准正交,即:$A^{\top}A=AA^{\top}=I$,$A^{-1}=A^{\top}$。
特征分解
矩阵分解(eigendecompostion)是使用最广的矩阵分解之一,即将矩阵分解成一组特征向量和特征值。
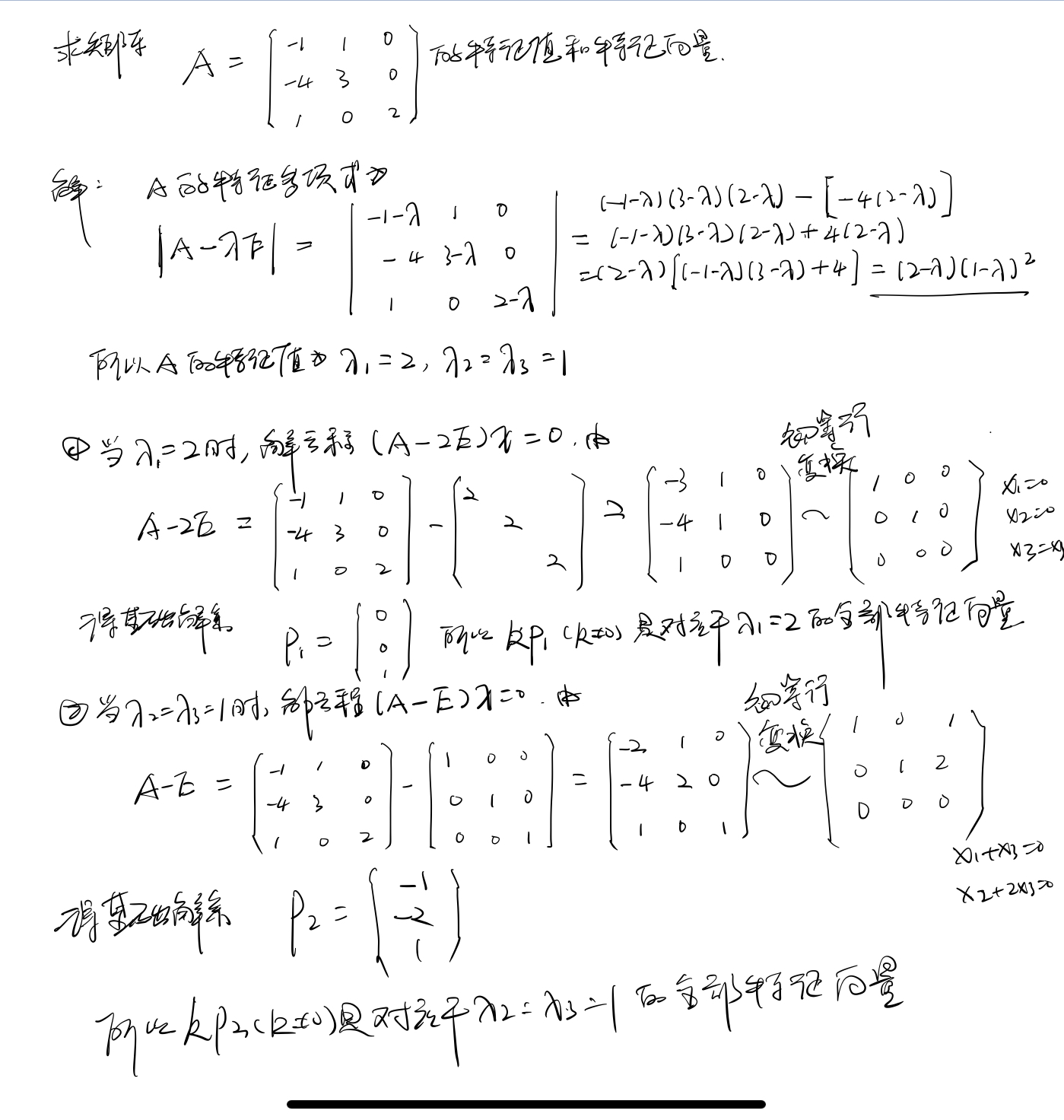
方阵$A$的特征向量(eigenvector)是指与$A$相乘后相当于对该向量进行缩放的非零向量$v$:
其中标量$\lambda$称为这个特征向量对应的特征值(eigenvalue)。
如果一个$n\times n$矩阵$A$有$n$组线性无关的单位特征向量$\{ v^{(1)},…,v^{(n)} \}$,以及对应的特征值$\lambda _{1},…,\lambda _{n}$。将这些特征向量按列拼接成一个矩阵$V=\left [ v^{(1)},…,v^{(n)} \right]$,并将对应的特征值拼接成一个向量:$\lambda=\left [\lambda _{1},…,\lambda _{n}\right ]$。
$A$的特征值分解为:
所有特征值都是正数的矩阵称为正定(positive definite);所有特征值都是非负数的矩阵称为半正定(positive semidefinite);所有特征值都是负数的矩阵称为负定(negative definite);所有特征值都是非正数的矩阵称为半负定(negative semidefinite);
注意:
- 不是所有的矩阵都有特征分解。
- 在某些情况下,实矩阵的特征值分解可能会得到复矩阵。
程序实现
1 | # 特征值和特征向量 |
手动推算
奇异值分解
奇异值分解(singular value decomposition,SVD)将矩阵分解为奇异向量(singular vector)和奇异值(singular value)。与特征值分解相⽐,奇异值分解更加通⽤,所有的实矩阵都可以进⾏奇异值分解,⽽特征值分解只对某些⽅阵可以。
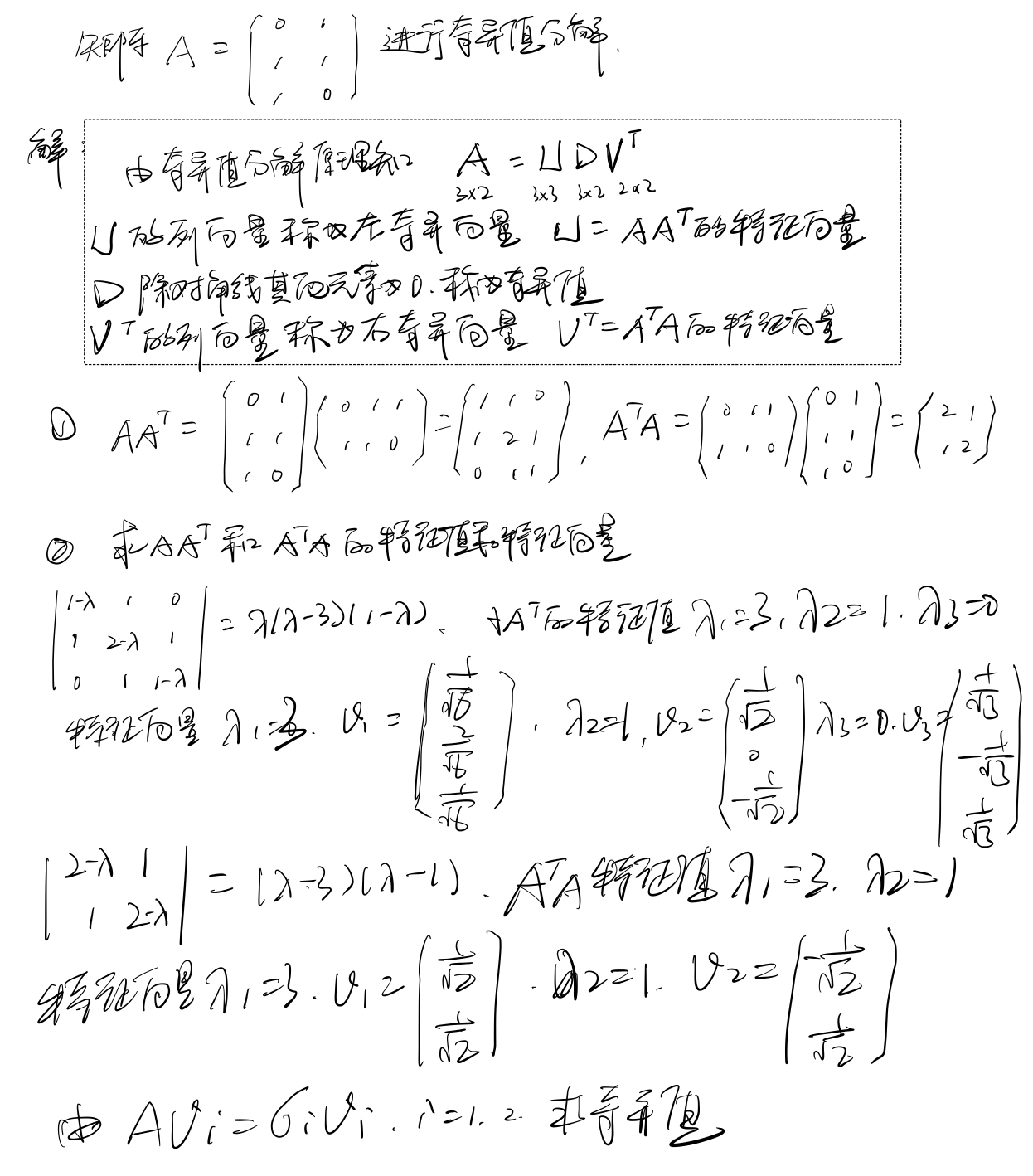
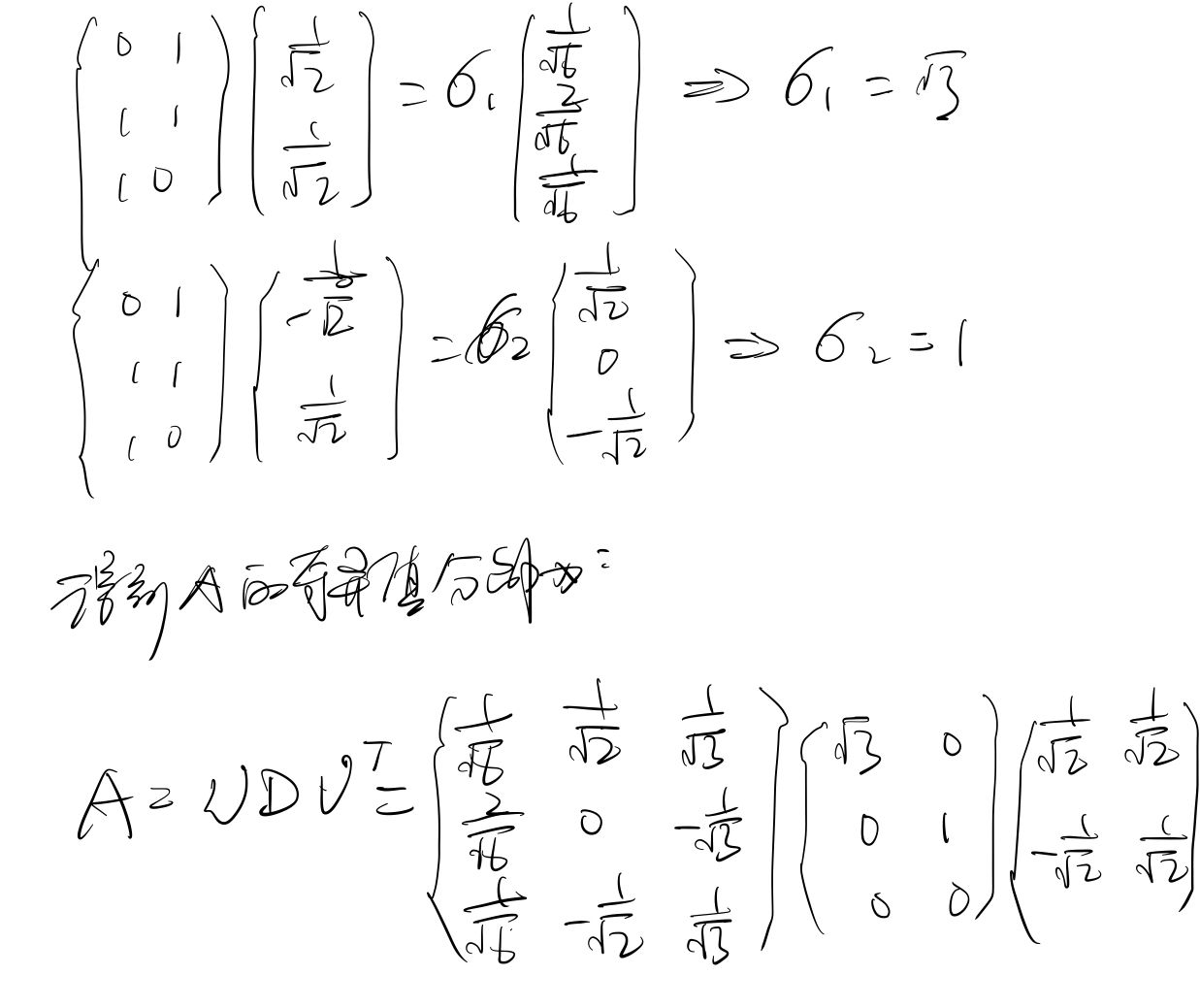
奇异值分解的形式为:
若$A$是 $m \times n$ 的,那么 $U$ 是 $m \times m$ 的,其列向量称为左奇异向量,⽽ $V$ 是 $n \times n$ 的,其列向量称为右奇异向量,⽽ $D$ 是 $m \times n$ 的⼀个对⾓矩阵,其对⾓元素称为矩阵 $A$ 的奇异值。左奇异向量是 $AA^{\top}$ 的特征向量,⽽右奇异向量是 $A^{\top}A$ 的特征向量,⾮ 0 奇异值的平⽅是 $A^{\top}A$ 的⾮ 0 特征值。
SVD分解矩阵A的步骤
- 求$AA^{\top }$的特征值和特征向量,用单位化的特征向量构成$U$。
- 求$A^{\top }A$的特征值和特征向量,用单位化的特征向量构成$V$。
- 将$AA^{\top }$或者$A^{\top }A$的特征值求平方根,构成$D$。
程序实现
1 | # 奇异值分解 |
手动推算
迹运算
迹运算返回的是矩阵对角元素的和:
行列式
行列式,$det(A)$是将一个方阵$A$映射到实数的函数。行列式等于矩阵特征值的乘积。行列式的绝对值可以用来衡量矩阵参与矩阵乘法后空间扩大或者缩小了多少。
主成分分析
花书中对于PCA的讲解不是很清晰,理论性很强,很难根据书中公式进行推导。于是查阅相关资料,总结出一套清晰的推导步骤:
背景与作用
在研究与应用中,需要对收集的大量数据进行分析,随着数据集变量增多,且变量间可能存在相关性,便加大了问题分析的复杂性,如果对每个指标进行分析,往往分析是孤立的,不能完全利用数据中的信息,而盲目的减少指标会损失很多有用的信息,产生错误的结论。
因此,需要找到一种合理的方法,对指标进行降维,既要减少分析的指标,又要达到对所收集的数据进行全面分析的目的。降维算法如:奇异值分解(SVD) 、主成分分析(PCA) 、因子分析(FA) 、独立成分分析(ICA) 。
降维是一种对高维度特征数据预处理方法。是将高维度的数据保留下最重要的一些特征,去除噪声和不重要特征,实现提升数据处理速度的目的。在实际生产和应用中,降维在一定的信息损失范围内,可帮助我们节省大量时间和成本。降维的优点:
- 使数据集更易使用
- 降低算法的计算开销
- 去除噪声
- 使得结果容易理解
PCA概念
PCA(Principal Component Analysis),即主成分分析方法,是一种使用最广泛的数据降维算法。PCA的主要思想是将n维特征映射到k维上,这k维是全新的正交特征也被称为主成分,是在原有n维特征的基础上重新构造出来的k维特征。PCA的工作就是从原始的空间中顺序地找一组相互正交的坐标轴,新的坐标轴的选择与数据本身是密切相关的。其中,第一个新坐标轴选择是原始数据中方差最大的方向,第二个新坐标轴选取是与第一个坐标轴正交的平面中使得方差最大的,第三个轴是与第1,2个轴正交的平面中方差最大的。依次类推,可以得到n个这样的坐标轴。通过这种方式获得的新的坐标轴,我们发现,大部分方差都包含在前面k个坐标轴中,后面的坐标轴所含的方差几乎为0。于是,我们可以忽略余下的坐标轴,只保留前面k个含有绝大部分方差的坐标轴。事实上,这相当于只保留包含绝大部分方差的维度特征,而忽略包含方差几乎为0的特征维度,实现对数据特征的降维处理。
PCA算法
输入: 样本集$D=\left \{ x_{1},x_{2},…,x_{m} \right \}$ ; 低维空间维数$k$ 。
过程:
- 对所有样本进行去中心化,即每一位特征减去各自的平均值:$x_{i}\leftarrow x_{i}-\frac{1}{m}\sum_{i=1}^{m}x_{i}$ ;
- 计算样本的协方差矩阵:$XX^{\top}$ ;
- 对协方差矩阵$XX^{\top}$做特征值分解 ;
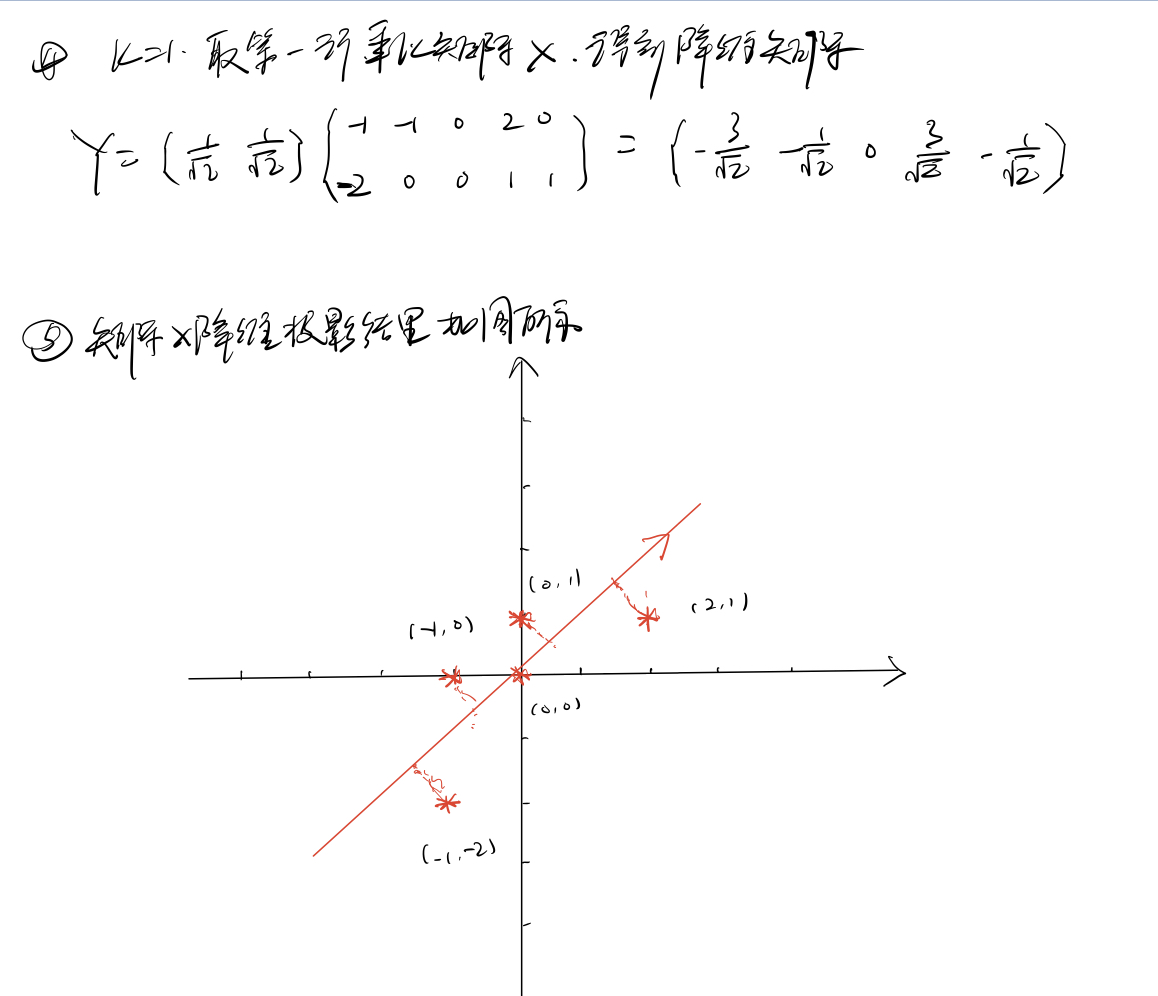
- 对特征值从大到小排序,取最大的$k$个所对应的特征向量$w_{1},w_{2},…,w_{k}$ 。
输出: 投影矩阵$W=(w_{1},w_{2},…,w_{k})$。
代码实现
1 | # Python实现 |
1 | # sklearn实现 |
sklearn对奇异值分解结果进行了处理,会导致PCA降维结果不一致,但都正确。
手动推算